具身智能实训课程
1学期 | 理论学时 4学时 | 实验课时 26课时
任务名称子任务课时
01开发环境搭建
仿真环境简介与搭建
2硬件平台简介与搭建
202视觉语言引导的智能导航
视觉语言导航原理
2数据采集与标注
2模型训练与仿真实验
2Sim-to-Real 部署
403视觉语言引导的智能操作
模仿学习原理
2数据采集与标注
2模型训练与仿真实验
2Sim-to-Real 部署
404智能导航操作综合实战
任务简介与系统设计
2综合应用训练与挑战
4
具身智能作为新兴的多学科交叉领域,多数高校尚未建立成熟的专业课程体系,缺乏标准化的教学案例与实验指引。
提供涵盖机器人学基础、Sim2Real 基础、模仿学习算法实训、具身智能原理与算法、硬件实操等系列化的教学模块内容。
现有教学多偏重产品手册或理论知识,学生缺乏接触真实具身智能硬件的机会,难以深入了解具身智能算法在物理环境中的表现。
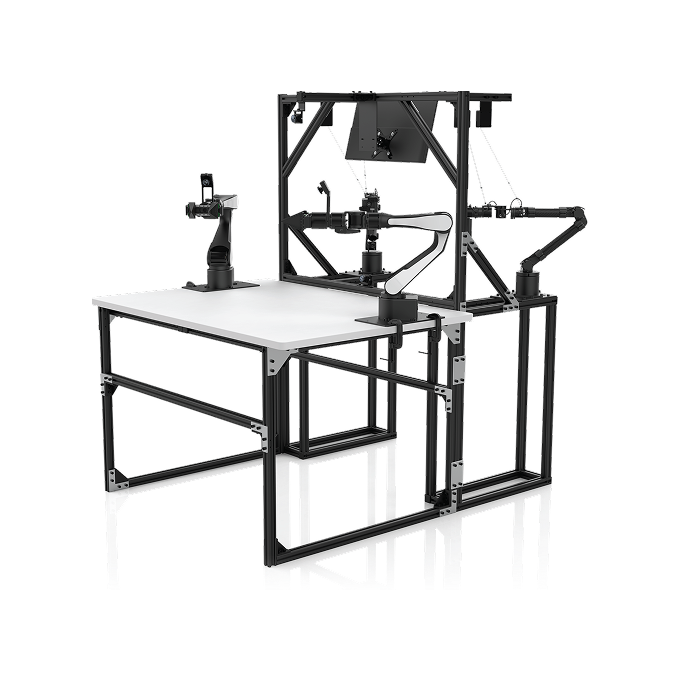
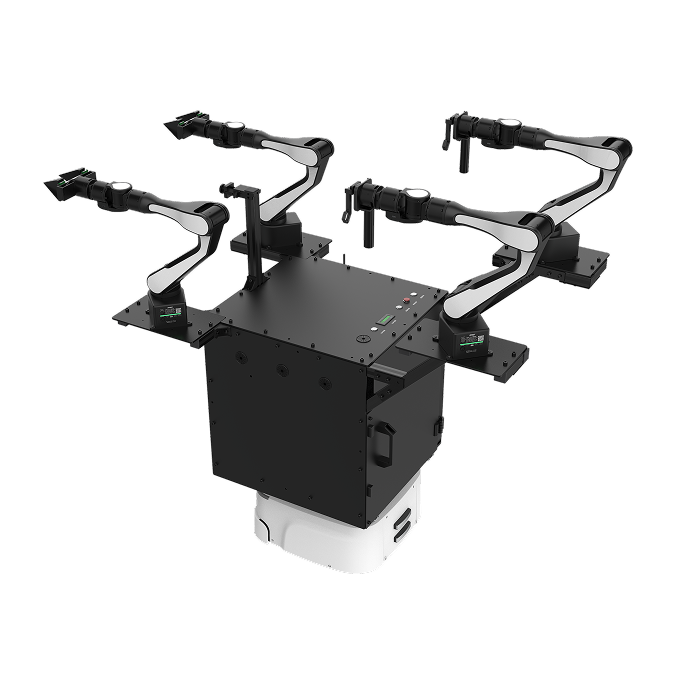
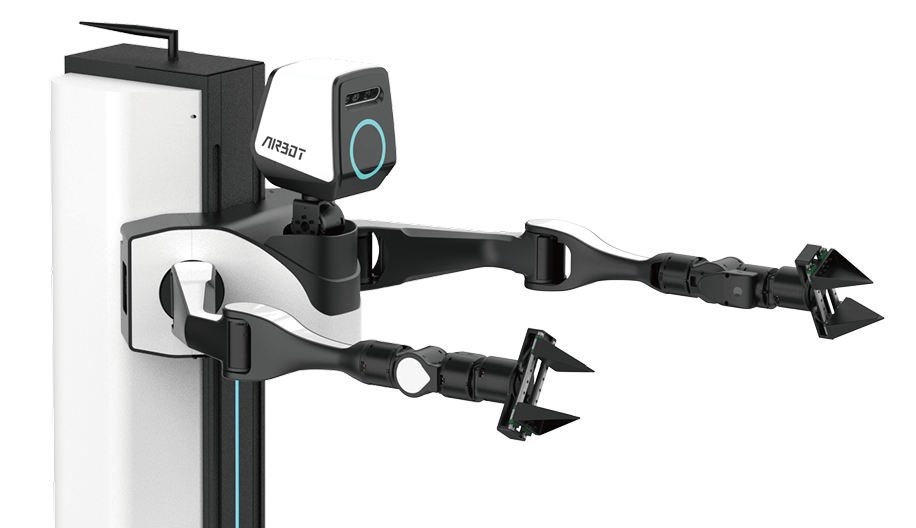
依托 AIRBOT 系列硬件与高保真仿真环境,配合实验手册与开发套件,让教学不再局限于理论,实现真机实操部署。
完整参与具身智能
实现架构开放
可复用拓展资源丰富
1学期 | 理论学时 4学时 | 实验课时 26课时
仿真环境简介与搭建
2硬件平台简介与搭建
2视觉语言导航原理
2数据采集与标注
2模型训练与仿真实验
2Sim-to-Real 部署
4模仿学习原理
2数据采集与标注
2模型训练与仿真实验
2Sim-to-Real 部署
4任务简介与系统设计
2综合应用训练与挑战
42天 | 理论学时 10学时 | 实训内容 10学时
具身智能概览
机器人学基础
Linux快速入门
机械臂真机实操
Robot Learning
Sim2Real 基础
仿真器实训
模仿学习算法实训
具身智能原理与算法
具身智能算法进阶实训
*以上为课程示例,如需定制课程,请前往购买渠道页面进行咨询。