
末端执行器



遥操作配件




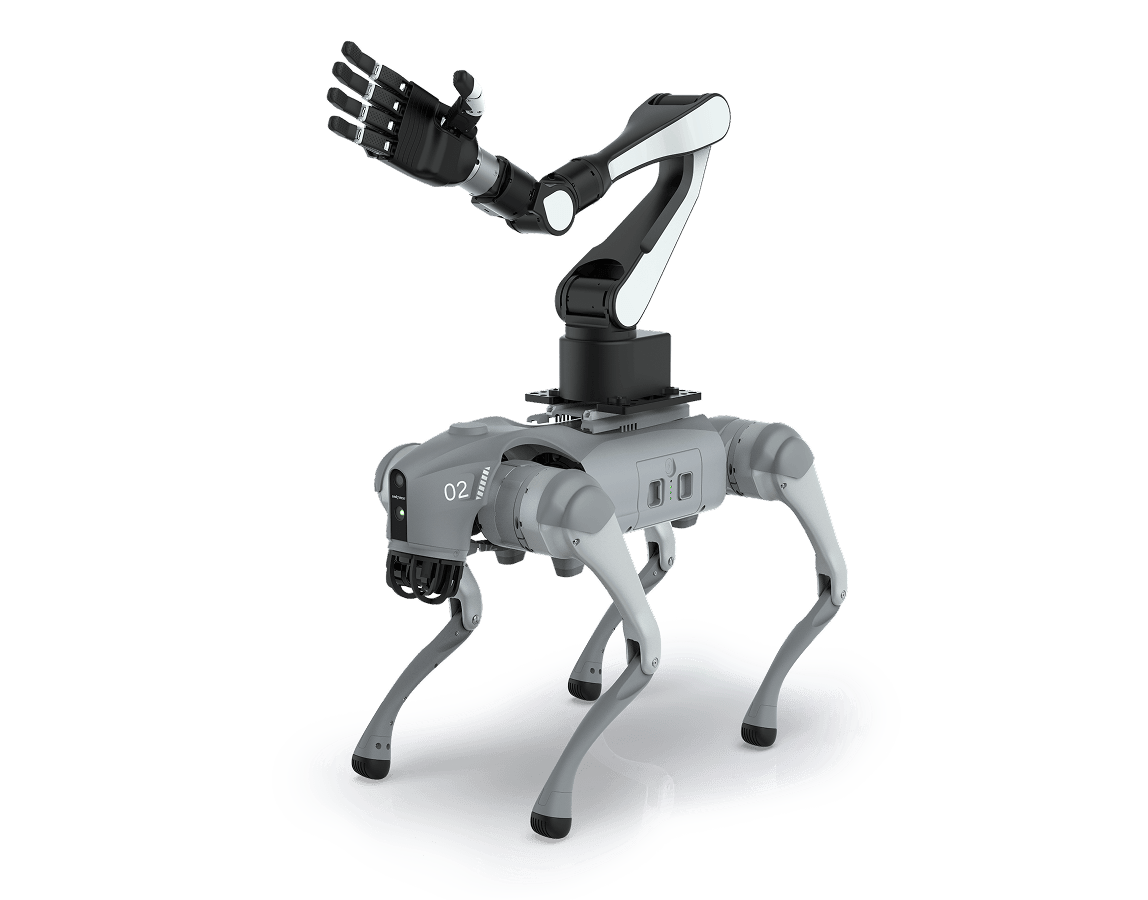
本移动四足灵巧操作平台构建了高度开放的软硬件生态体系,在硬件配置上,目前已兼容宇树Go2 EDU 四足机器狗作为移动底盘,并广泛适配因时、傲意、强脑等主流品牌的多款灵巧手,实现了从移动到末端执行的无缝协同。
同时,产品配套丰富的应用案例与开放式软件框架,全面支持用户开展二次开发,覆盖机器人导航与控制、同步定位与建图(SLAM)、路径与轨迹规划、机器人动力学、机器视觉、具身智能等核心算法研发与实际应用落地。
高性能机械臂精准作业
可实现远程遥操作控制
多品牌主流灵巧手兼容
开放接口支持二次开发
本移动四足灵巧操作平台构建了高度开放的软硬件生态体系,在硬件配置上,目前已兼容宇树 Go2 EDU 四足机器狗作为移动底盘,并广泛适配因时、傲意、强脑等主流品牌的多款灵巧手,实现了从移动到末端执行的无缝协同。同时,产品配套丰富的应用案例与开放式软件框架,全面支持用户开展二次开发,覆盖机器人导航与控制、同步定位与建图(SLAM)、路径与轨迹规划、机器人动力学、机器视觉、具身智能等核心算法研发与实际应用落地。
注:本配置清单以因时灵巧手为例,方案亦兼容傲意、强脑等主流灵巧手型号,具体选型可根据项目需求灵活配置。