前沿科研助力
完美兼容具身智能开源生态,提供操作手册帮助用户复现 Aloha、DP、RDT、Pi0.5、HIL-SERL 等具身智能前沿工作。此外,可向特定客户提供采集数据服务,共同打造算法新前沿。
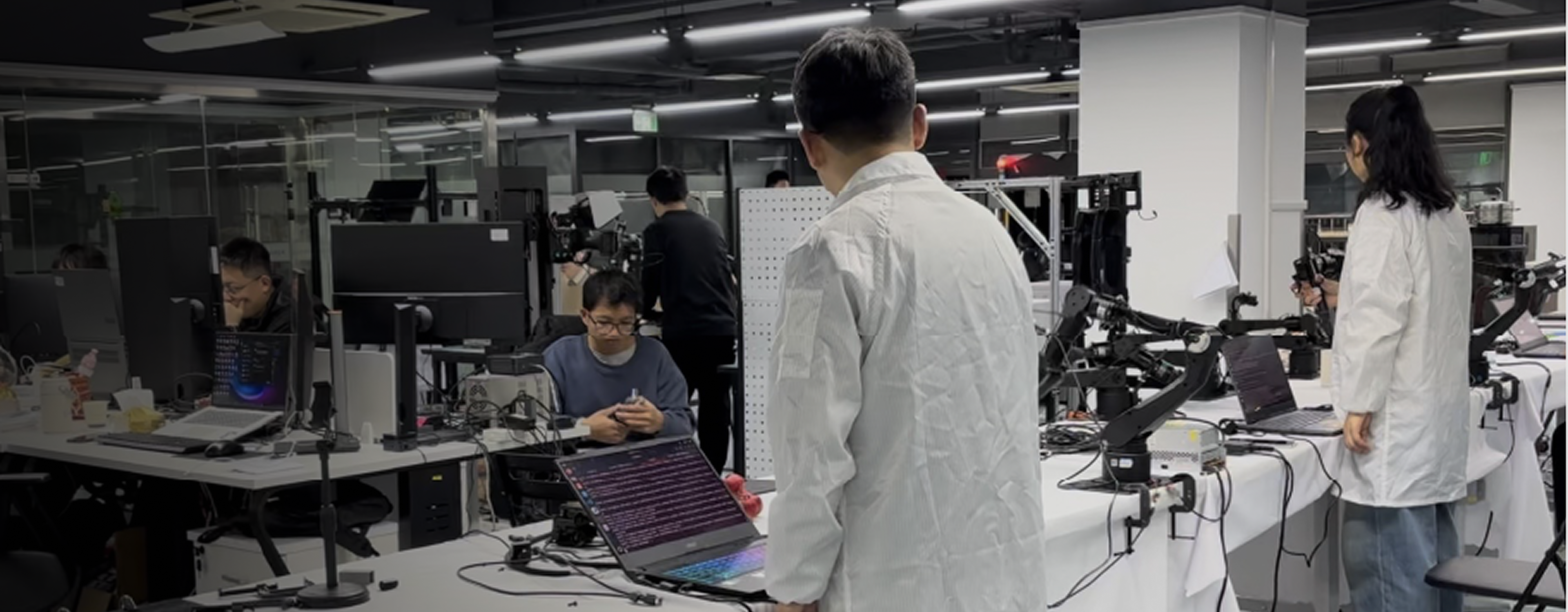
复现前沿工作(如 Aloha、DP、Pi0.5 等)时,常因硬件规格不一致或缺少标准化操作手册,导致研究人员在环境搭建上耗费大量非必要时间。
我们提供针对 Pi0、Pi0.5、ACT 等主流具身智能工作的适配方案与操作手册,协助科研团队实现高效复现与基准测试。
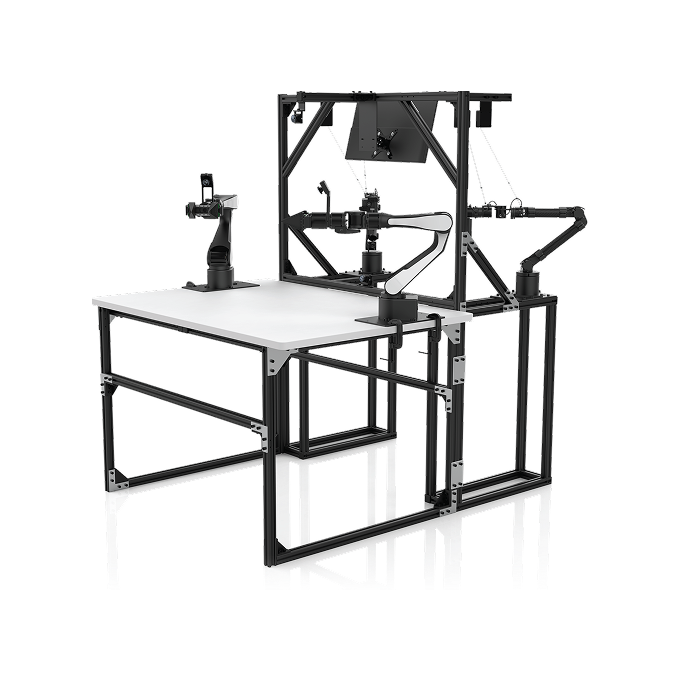
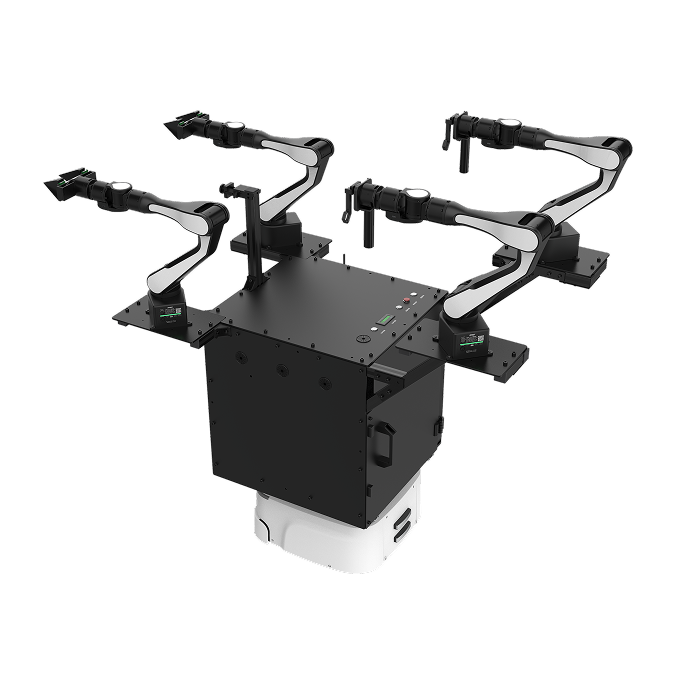
缺乏支持力矩控制、底层接口不开放或自重过大的机械臂,限制了复杂交互算法及移动操作实验的开展。
AIRBOT Play 原生支持位置、力矩、速度控制模式,具备高负载自重比,可轻松挂载于各类移动平台。
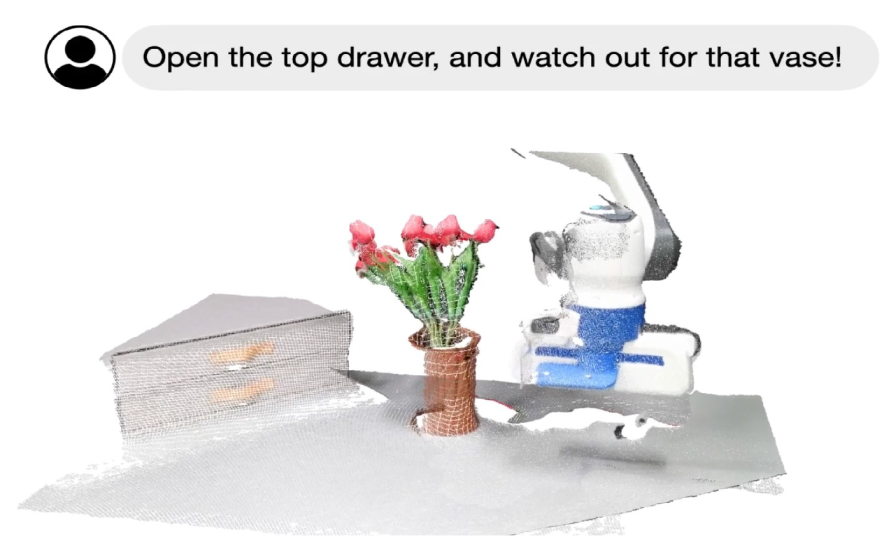
仿真环境与真实物理世界存在动力学差异,导致算法在虚拟环境验证后难以高保真地迁移至真机,研发迭代效率低。
提供完备的 URDF 模型文件,依托 DISCOVERSE 仿真平台实现高保真模拟,助力算法快速验证与技术创新。
接轨 ICRA Sim-to-Real 挑战赛、IROS 建筑机器人大赛等诸多国内外赛事,打造赛课一体的科研与人才培养模式。
完美兼容具身智能开源生态,提供操作手册帮助用户复现 Aloha、DP、RDT、Pi0.5、HIL-SERL 等具身智能前沿工作。此外,可向特定客户提供采集数据服务,共同打造算法新前沿。
提供完备 URDF 模型文件,智能仿真平台可实现高效部署、高保真模拟,助力具身智能算法的快速研发与验证,推动具身智能技术的创新与应用升级。

直通国际前沿,打造赛课一体的人才培养模式,用于 IEEE 机器人领域学术会议 ICRA Sim-to-Real 挑战赛、IROS 建筑机器人大赛、无锡国际人工智能创新应用大赛等诸多赛事。