
安全抱闸
J1-J3 关节硬抱闸
具身智能科研生态,数据采集,智能作业
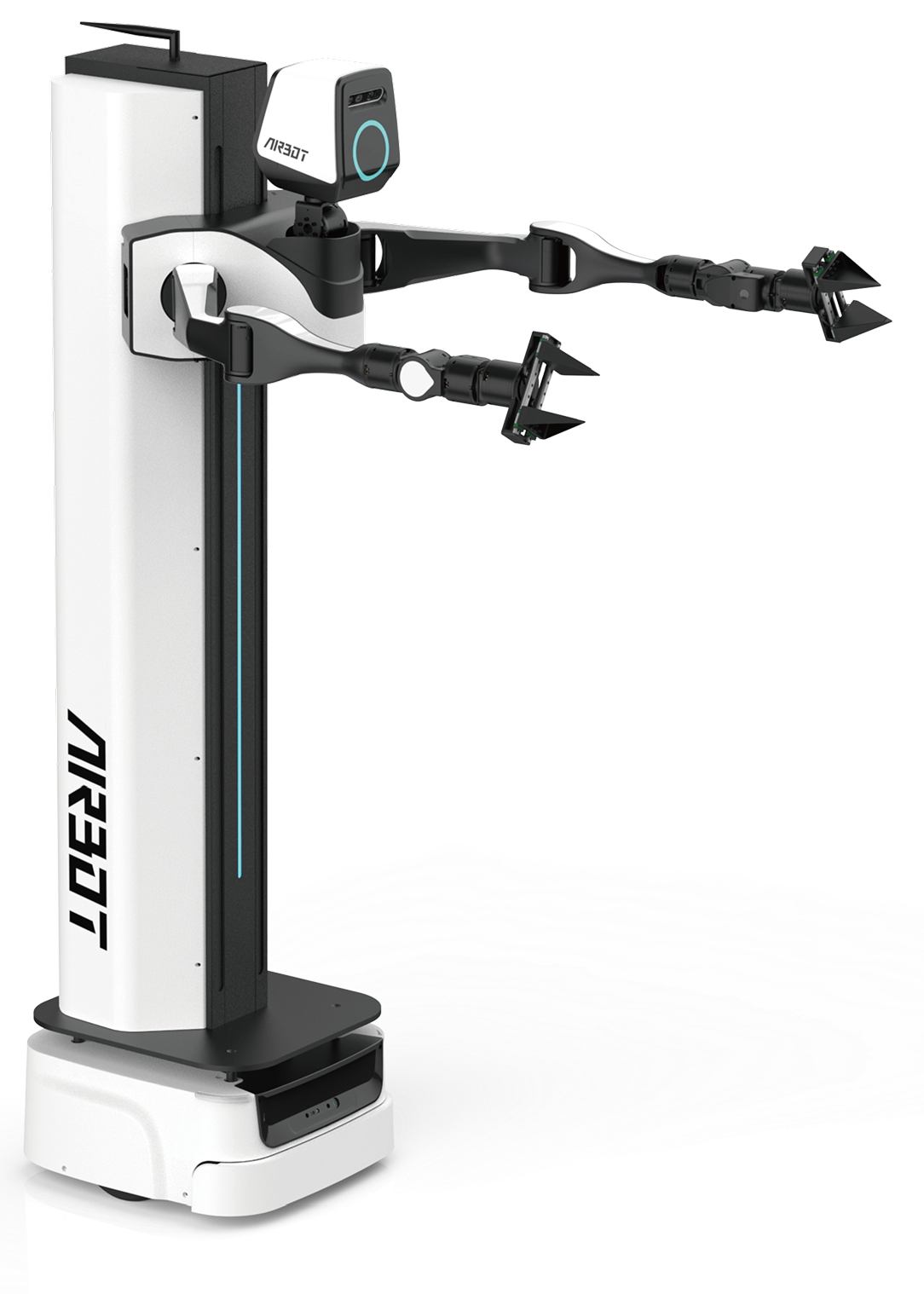
J1-J3 关节硬抱闸
±0.1 mm

智能移动升降双臂平台MMK2支持多种处理器、传感器和执行器的融合应用,用户可以根据需求自由组合与搭配。提供 Python/ROS2 调用接口及开发套件,覆盖机器人应用开发的全流程。可以轻松进行二次开发。










助力具身算法高效部署与教学演示直观呈现,成为学术探索与知识传递的得力助手。
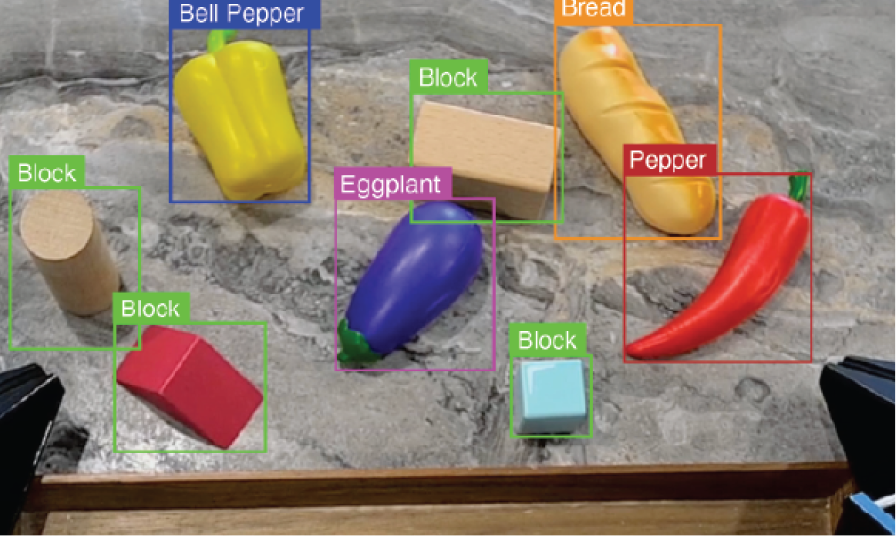
支持多类型场景下的精准数据获取与实时传输,为模型训练提供优质可靠数据支撑。

未来可实现接待、递送等流程自动化,适配商场、超市等场景的多元运营需求。

双臂协同精准操控,聚焦多场景家庭任务处理,为未来家庭生活提供智能化助力。
