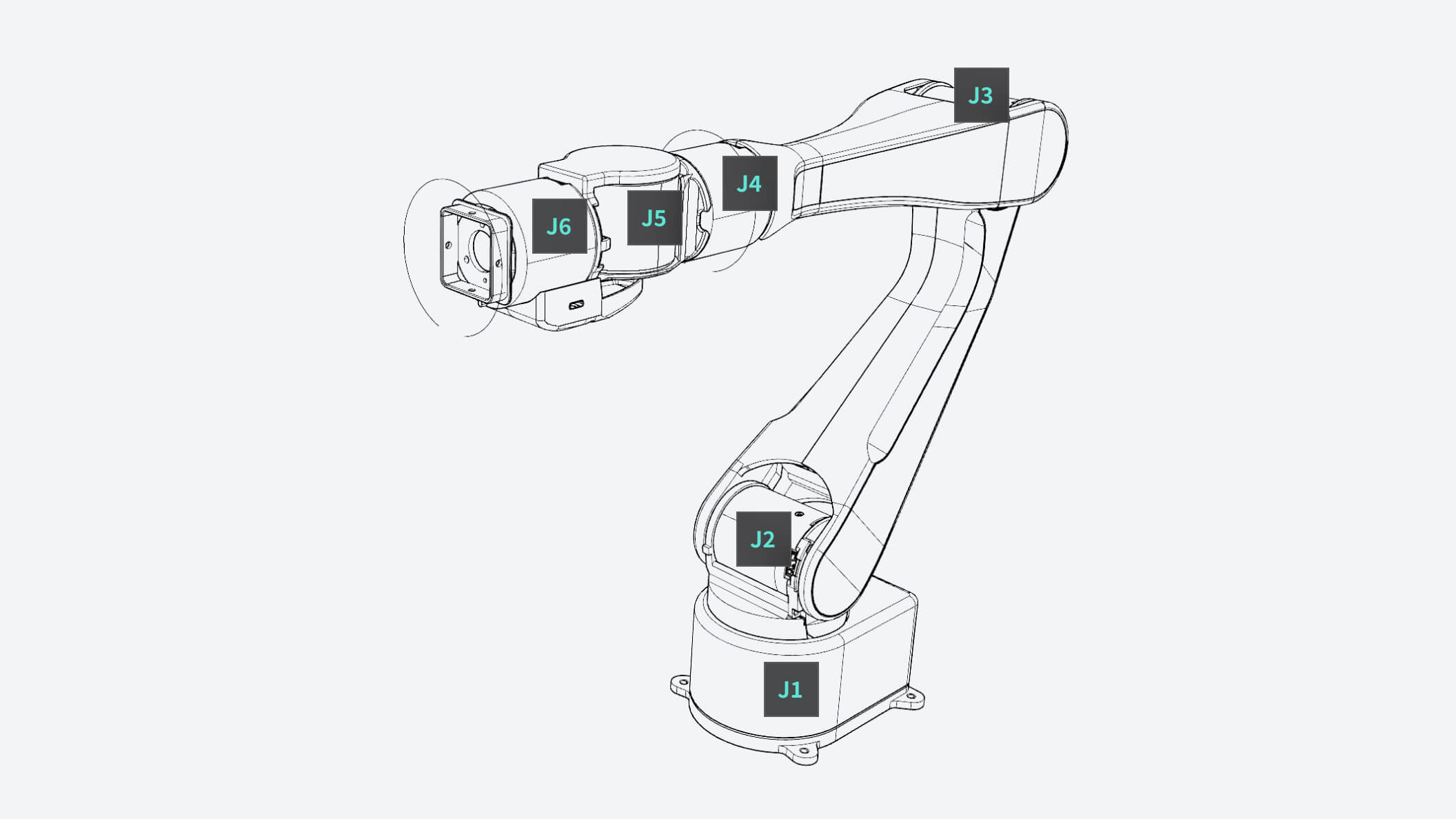
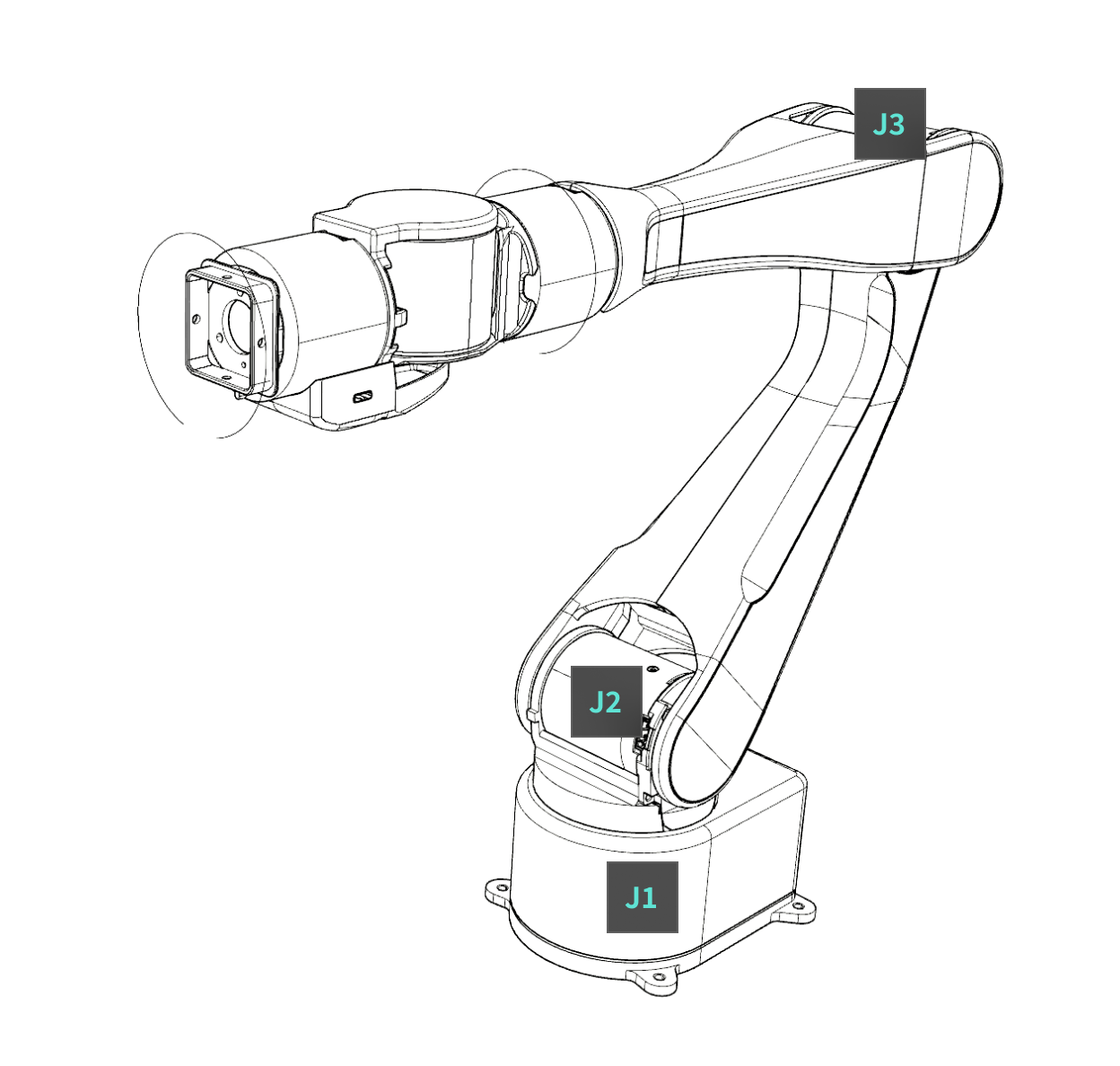
安全抱闸
J1-J3 关节硬抱闸
专为具身智能科研、教育实训及行业应用探索而设计

J1-J3 关节硬抱闸
3.78kg




±0.1mm

647mm

提供“高柔顺”的拖动示教手感


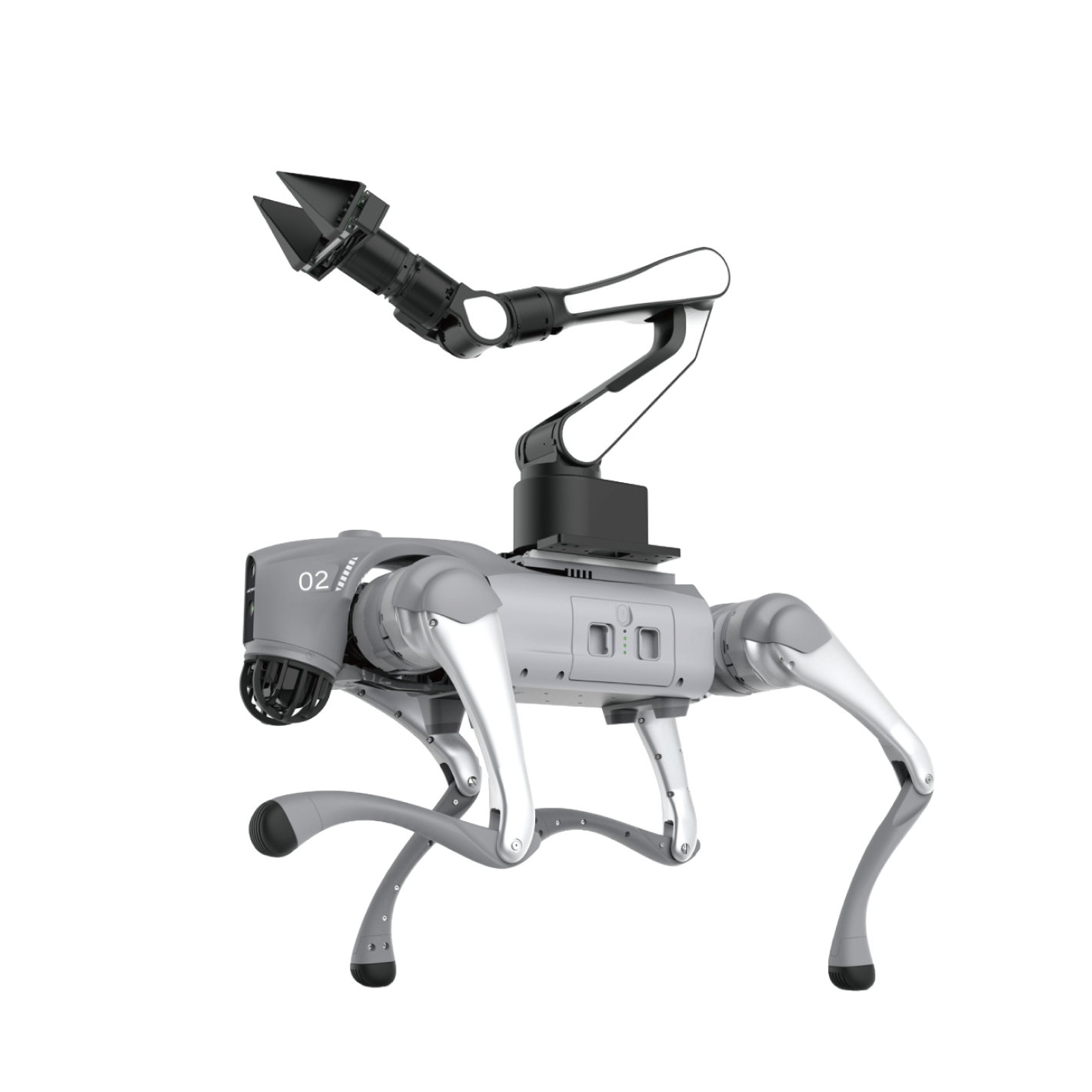
AIRBOT Play 采用独特轻量化设计,是高集成度六自由度智能机械臂,拥有高负载自重比,同时兼具安全性、可靠性、易用性和便携性。可轻松搭载于 桌面平台、四足机器人、轮式机器人、轮足式机器人 等各类常见移动平台,用于完成不同场景下的桌面与移动操作任务。
轻量化本体让 AIRBOT Play 更适合机载部署、移动平台集成和教学实验场景,在保证稳定性的同时为系统预留更多负载空间。
桌面平台机械臂结构设计更紧凑,适合实验台、小型部署环境和高频示教场景,兼顾工作半径与空间友好度。
四足机器人
从单臂演示到移动平台联动,AIRBOT Play 可以自然融入教学、科研、展示和轻应用验证的不同流程。
轮式机器人
产品可与更多具身平台、末端执行器和算法框架协同工作,为实验验证与系统搭建提供充足弹性。
轮足式机器人AIRBOT Play 支持多种移动平台、处理器、传感器和执行器的融合应用,用户可以根据需求自由组合与搭配。提供 Python/C++/ROS2 调用接口及开发套件,覆盖机器人应用开发的全流程。可以基于 AIRBOT Play 轻松进行二次开发。