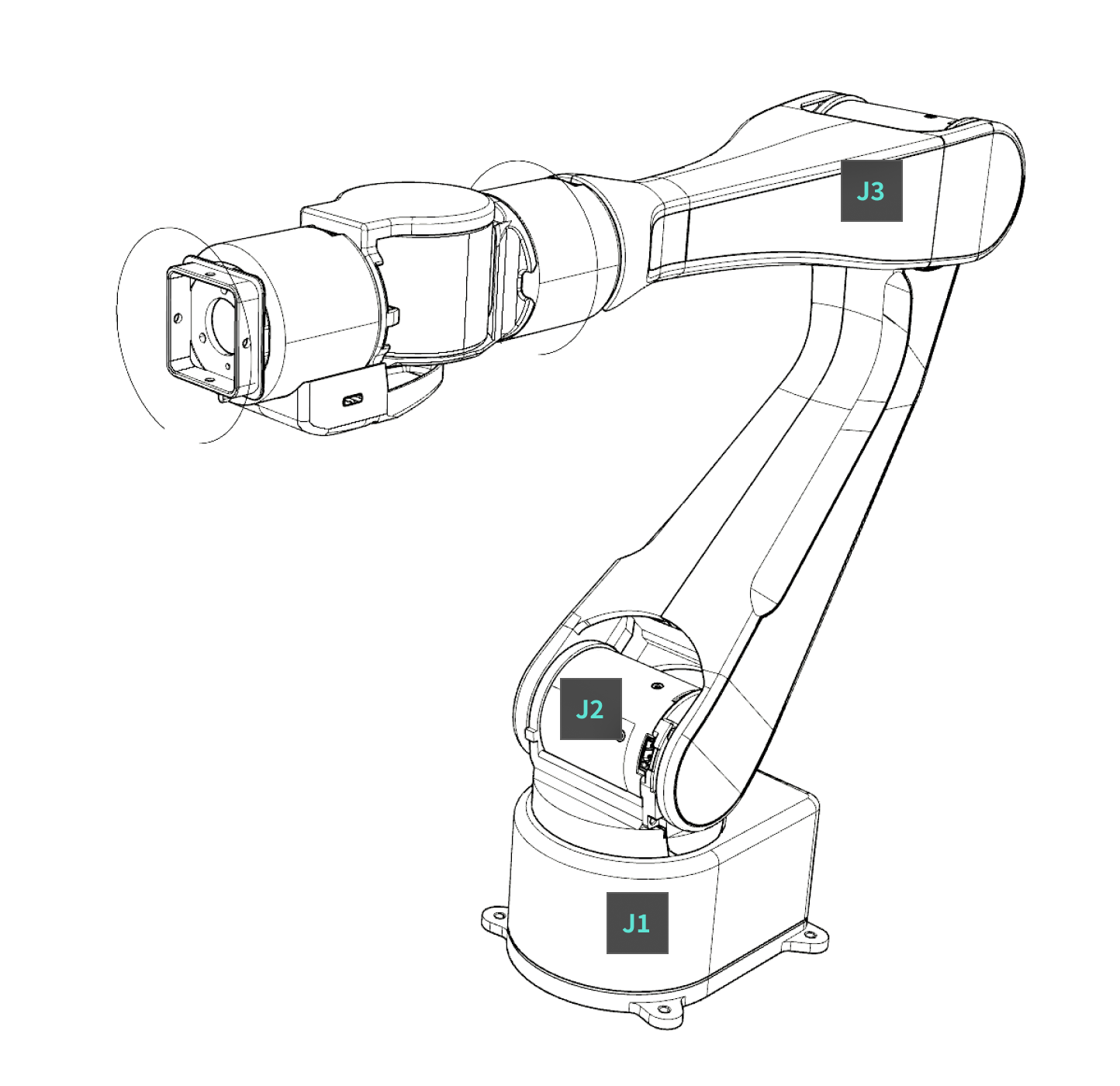
AIRBOT Play 六轴机械臂经典版 * 2自由度6自重3.78 kg额定负载1.5 kg (持续运行)最大臂展647 mm重复定位精度±0.1 mm主要材质铝合金 + ABS控制模式位置控制,力矩控制,速度控制电源输入24 V ±5%, 9.2 A最大功耗240 WSDKC++, Python, ROS2关节运动范围J1 [-180°, +120°]; J2 [-170°, +10°]; J3 [-5°, +180°]; J4 [-172.5°, +172.5°]; J5 [-105°, +105°]; J6 [-172°, +172°]关节最大速度J1 180°/s; J2 180°/s; J3 180°/s; J4 360°/s; J5 360°/s; J6 360°/s